

베스트셀러 상품
-

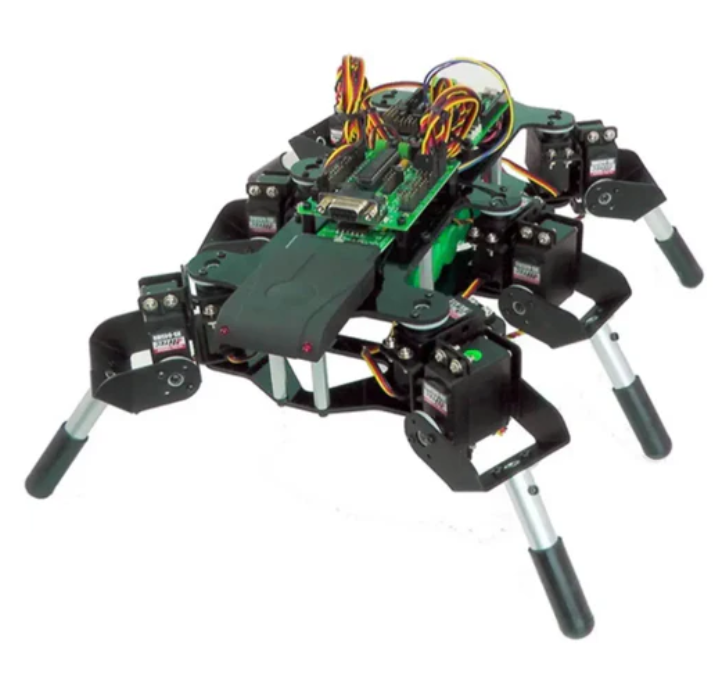
ROBOTIS BIOLOID 고급 의인 로봇 키트
$1,299.90 -
휴대용 로봇 '스택짱 RT ver.'
$510.00 -
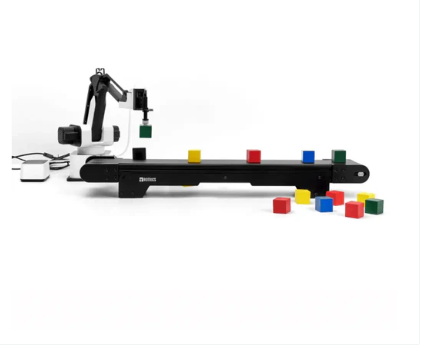
Rotrics 컨베이어 키트
$603.79 -
야방 젯코봇 7축 비전 협업 로봇팔 - 젯슨 나노 4GB
$1,049.00




- Raspberry Pi 지원, 로봇 운영 체제(ROS) 기반
- HD 광각 카메라 탑재
- 1인칭 시야각(FPV) 이미지 전송 지원
- 강력한 섀시 이동성
- 오픈 소스 풍부한 자습서
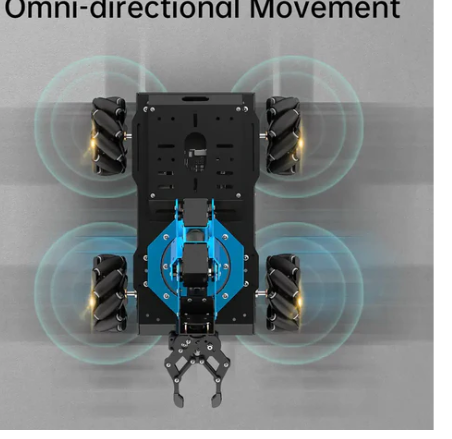
- Hiwonder Armpi Pro Raspberry Pi ROS 로봇 암 개발 키트, 4WD 맥넘 휠 섀시가 장착된 오픈 소스 로봇 자동차Armpi FPV Vision로봇 팔 개발에 더해 전방향 맥넘 휠을 추가해 이동, 픽업, 목표 추적, 스마트 운송을 실현할 수 있다.탈부착 가능한 마그네틱 휠 카트는 데스크탑과 모바일 암 두 모델 사이에서 유연하게 전환할 수 있습니다.Armpi Pro에는 풍부한 자습서와 오픈 소스 Python 코드가 있습니다.ROS、로보트기술, 로보트시각을 학습하는 완벽한 플랫폼으로서 프로젝트개발주기를 단축하고 AI를 충분히 체험할수 있다.
- 1. 전방위 이동과 1인칭 시점
- 1) 360도 전방위 운동
- Armpi Pro고성능 인코더 감속 모터 4개와 전방향 맥넘 휠 4개가 탑재돼 360도 움직임이 가능하다.다양한 스포츠 모드 (전진, 수평, 대각선, 회전) 와 뛰어난 성능으로 어려운 복잡한 경로에 적합합니다.
- 2) 물체 운송과 1인칭 시점
- Armpi ProArmpi FPV Vision 로봇 팔이 탑재되어 있어 목표물을 쉽게 픽업하고 운송할 수 있다.로봇 암 전면의 HD 카메라와 함께 1인칭 시야각을 제공합니다.
- 2. AI 시각 식별과 목표 추적
- Armpi Pro는 OpenCV를 이미지 처리 라이브러리로 사용합니다.FPV카메라를 이용하여 목표 블록을 식별하고 위치를 확정하여 색상 분류, 목표 추적, 회선 추적 등 AI 게임을 실현한다.
- 1) 색상 추적
- 목표 물체의 시각적 위치와 로봇 팔의 역운동학 알고리즘을 통해 목표 물체에 대한 정확한 조준과 추적을 실현한다.
- 2) 색상 분류
- 풍부한 자습서와 오픈 소스 Python 코드를 통해 로봇 팔이 색상 인식, 선택 및 분류 작업을 수행할 수 있습니다.
- 3) 순환선
- OpenCV를 통해 ROI 영역을 추출하고 노이즈 제거, 이미지 2값화를 거쳐 PID 알고리즘을 이용하여 방향 교정을 진행하여 순선을 실현한다.
- 3. APP 제어 및 FPV 전송 이미지
- 안드로이드와 iOS 앱은 로봇의 원격 제어에 사용할 수 있다.이 앱은 실시간으로 로봇을 제어해 클릭만으로 다양한 AI 게임을 전환할 수 있다.
- 1) 1인칭 시야각 및 HD 전송 이미지
- Armpi Pro는 WLAN, WIFI 직접 연결 모드를 지원합니다.WiFi연결 후 1인칭 시점을 앱 인터페이스로 전달해 자극적인 로봇 조작 경험을 선사한다.
- 2) 실시간 원격 조종 및 선별 운송
- 이 응용 프로그램을 사용하여 Armpi Pro를 쉽게 이동, 필터링 및 운송할 수 있습니다.
- 3) AI 게임을 빠르게 경험
- 게임 모드를 쉽고 빠르게 전환해 다양한 AI 게임을 체험할 수 있다.
- 4. 하드웨어 특징
- 1) 경질 알루미늄 합금
- 하드 알루미늄 합금은 코어 컨트롤 패널을 파쇄 및 충격으로부터 보호하고 더 큰 하중을 견딜 수 있습니다.
- 2) 인코더 모터 및 인코더 모터 드라이브
- 대감속은 인코딩 모터보다 바퀴 속도와 주행 거리를 정확하게 계산할 수 있으며, 4채널 인코딩 모터 드라이브는 모터 제어를 더욱 간단하게 한다.
- 3) HD 120도 광각 카메라
- Armpi Pro120도 광각 카메라를 탑재해 180도 둘러보기와 180도 상하 관찰을 할 수 있으며 맥넘 섀시 승용차와 함께 360도 가시범위를 실현할 수 있다.
- 4) 고성능 직렬 버스 키잡이
- 전압과 위치 피드백을 제공할 수 있고, 강도가 더 크며, 차단 방지 알고리즘이 내장되어 있어 사용 수명이 더 길다.
- 5) 12000mAh 대용량 리튬이온 배터리
- 12000mAh 대용량 리튬이온 배터리를 내장해 로봇에 강력한 동력을 제공하고 수명을 연장한다.
관련 상품









© cnebaymall-2023