

-

Robot Drive Trackpod MTP 15
$1,870.00 -
WLkata 6축 미니 로봇 암 Mirobot 교육 키트(미국 플러그)
$2,032.80 -
원격제어 3트랙 전차 로봇 키트(카메라 포함)
$1,715.78 -
레볼루션 로봇 번들
$2,056.99 -
Velleman Mono VU Meter 10LED 솔더링 키트
$2,327.00






참고: SLAMTEC A1 레이저 레이더를 탑재한 JetAuto 엔트리 키트로 6가지 버전으로 제공되며 다른 JetAuto 버전은 다음 지침을 참조하십시오.
NVIDIA Jetson Nano 지원 및 ROS 기반
3D 비주얼 매핑 및 탐색용 깊이 카메라 옵션
패라메트릭 모니터링 및 디버깅을 위한 7형 터치스크린 옵션
마이크 어레이 6개, 음성 인터렉션용 마이크 어레이 6개, 음성 인터렉션용
제품 설명:
JetAuto는 Jetson Nano가 지원하는 엔트리급 ROS 교육 로봇입니다.JetAuto는 레이저 레이더, 심도 카메라 및 7형 스크린을 갖추고 있으며 로봇 모션 제어, 지도 제작 및 내비게이션, 인체 특성 인식과 같은 다양한 기능을 제공합니다.
1) 360° 전방위 이동
JetAuto는 360 ° 로 이동할 수 있는 4개의 만방향 맥넘 휠을 장착하고 있으며, 다양한 이동 방식 (전진, 수평, 사행, 회전) 과 우수한 성능으로 다양한 복잡한 노선에 과감하게 도전할 수 있다.
2) 레이저 레이더 및 SLAM 매핑 탐색 지원
JetAuto는 레이저 레이더를 탑재하여 SLAM 구축 및 항법을 실현할 수 있으며 경로 계획, 지정 항법 및 동적 장애물 회피를 지원한다.
3) 직류 기어 모터
고정밀 인코더가 있는 강력한 동력을 제공하며 수명 연장을 위한 보호 엔드 셸이 포함되어 있습니다.
4) 7형 HD LCD 터치스크린
화면 해상도는 1024 x 600 픽셀이며 NVIDIA와 호환되므로 로봇의 다양한 매개 변수를 자유롭게 모니터링하고 디버깅할 수 있습니다.
5) 240° 고성능 클라우드
JetAuto의 고정밀 플랭크 서스펜션 구조는 네 바퀴가 받는 힘의 균형을 맞추어 평탄하지 않은 노면에 잘 적응할 수 있도록 한다.
6) 6채널 원격 마이크 어레이
6채널 마이크 어레이 및 스피커는 음원 위치, 음성 인식 제어, 음성 네비게이션 등의 기능을 지원한다.
1.레이저 레이더 측량 항법
JetAuto는 레이저 레이더를 탑재하여 경로 계획, 지정 항법, 항법 장애물 회피, 다양한 알고리즘 설계도를 지원하여 레이더 수비, 레이더 추적 기능을 실현한다.
1) 레이저 레이더 포지셔닝
자체 개발한 Lidar 고정밀 인코더와 IMU 가속도계 센서 데이터를 결합하면 JetAuto는 정확한 측량과 네비게이션을 구현할 수 있다.
2) 각종 2차원 레이저 레이더 측량 방법
JetAuto는 Gmapping, HectorKarto, Cartographer 등 다양한 그래픽 알고리즘을 적용하고 경로 계획, 좌표 탐색, 네비게이션 장애물 회피 등의 기능을 지원한다.
3) 다중 지점 탐색, TEB 경로 계획
JetAtuo는 레이저 레이더로 주변 환경을 탐지하고 지정 항법, 다중 연속 항법 등 로봇 응용을 지원한다.
4) RRT 자체 탐색 지도
JetAuto는 RRT 알고리즘을 사용하여 인공적으로 제어할 필요 없이 자체 탐사 측량을 완료하고 지도를 저장하고 출발점으로 돌아갈 수 있습니다.
5) 동적 장애물 회피
TEB 경로 계획을 지원해 내비게이션 중 장애물을 실시간으로 모니터링함으로써 장애물을 피하고 계속 주행할 수 있도록 노선을 다시 계획한다.
6) 레이저 레이더 추적
레이저 레이더는 전방의 운동 물체를 스캔하여 로봇이 목표물을 추적할 수 있도록 한다.
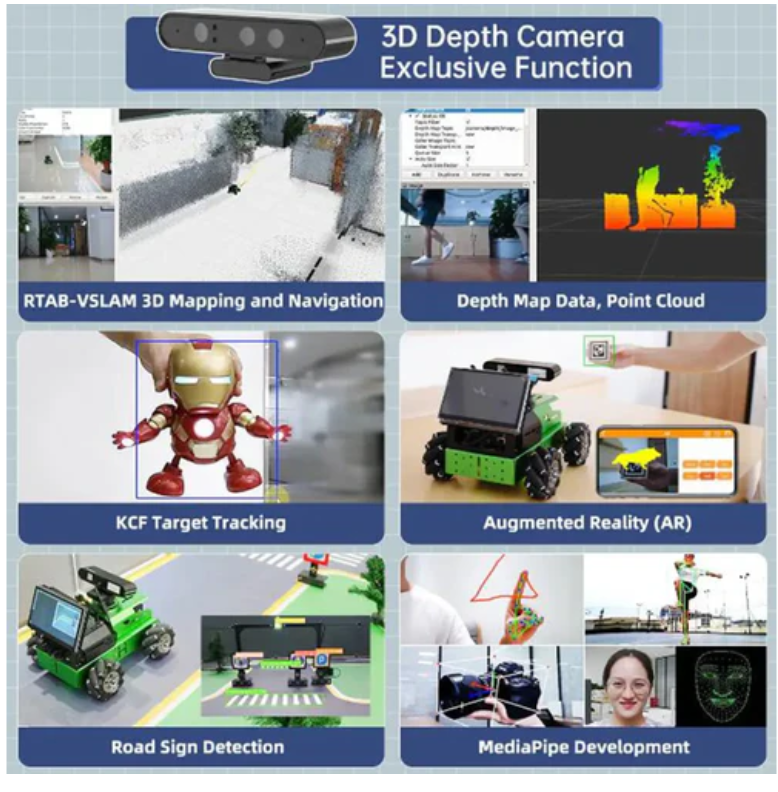
2. 3D Vision AI 업그레이드 상호 작용
JetAuto는 3D 심층 카메라를 탑재하여 3D 시각 건도 및 네비게이션을 지원하며 3D 포인트 클라우드 이미지를 얻을 수 있으며 딥 러닝을 통해 더 많은 AI 시각 인터렉션 플레이를 실현할 수 있다.
1) 3D 깊이 카메라
JeAuto에는 Astra Pro Plus 심도 카메라가 장착되어 있어 환경 변화를 효과적으로 감지하고 인간과의 스마트 Al 인터렉션을 실현할 수 있다.
2) RTAB-VSLAM 3D 비주얼 매핑 및 탐색
JetAuto는 RTAB SLAM 알고리즘을 이용하여 3D 컬러 지도를 만들어 3D 환경에서의 탐색과 장애물 회피를 실현하고 지도 내의 전역 위치를 지원한다.
3)ORBSLAM2 + ORBSLAM3
ORB-SLAM은 단일 눈, 이중 눈 및 RGB-D 카메라를 위한 오픈 소스 SLAM 프레임워크로, 카메라 궤적을 실시간으로 계산하고 3D 주변 환경을 재구성할 수 있으며 RGB-D 모드에서 물체의 실제 크기를 얻을 수 있습니다.
4) 심도 데이터, 포인트 클라우드
해당 APl을 통해 JetAuto는 카메라의 깊이 그래프, 컬러 이미지 및 포인트 클라우드를 얻을 수 있습니다.
3.딥러닝, 자율주행
JetAuto를 사용하면 ROS를 실제로 실행하도록 자동 운전 시나리오를 설계하여 자동 운전의 핵심 기능을 더 잘 이해할 수 있습니다.
1) 도로표지검측
JetAuto는 딥 러닝 모델 라이브러리를 훈련함으로써 Al 비전에 기반한 자동 운전을 구현할 수 있습니다.
2) 차선 유지
JetAuto는 양쪽 차선을 인식하고 차선과 안전 거리를 유지할 수 있습니다.
3) 자동 주차
딥러닝 알고리즘과 결합하여 JetAuto는 주차 표지를 식별한 후 자동으로 주차 공간으로 진입할 수 있다.
4) 의사 결정 전환
JetAuto는 차선, 도로 표지판, 교통 신호등에 따라 교통 상황을 판단하고 회전 여부를 결정합니다.
4. MediaPipe 발전, AI 인터렉션 업그레이드
제트오토는 메디아피프 개발 프레임워크를 활용해 인체 인식, 손끝 인식, 얼굴 검사, 3D 검사 등의 기능을 구현한다.
1) 손끝 궤적 인식
2) 인체 식별
3) 3D 체크
4) 3D 얼굴 검사
5. AI 시각 상호작용
인공지능을 접목함으로써 JetAuto는 KCF 목표 추적, 회선 추적, 색상/라벨 인식 및 추적, YOLO 물체 인식 등을 실현할 수 있다.
1) KCF 대상 추적:
KCF 필터링 알고리즘에 의존하면 로봇이 선택한 대상을 추적할 수 있다.
2) 시선 추종:
JetAuto는 사용자 정의 색상 선택을 지원하며 로봇이 색상 선을 인식하고 따라갈 수 있습니다.
3) 색상 / 레이블 식별 및 추적
JetAuto는 지정된 색상을 식별하고 추적할 수 있으며 여러 개의 April 태그와 좌표를 동시에 식별할 수 있습니다.
4) YOLO 물체 식별
YOLO 네트워크 알고리즘과 딥 러닝 모델 라이브러리를 이용하여 물체 식별을 한다.
6.6CH 원거리 마이크 어레이
이 6CH 원거리 마이크 어레이는 원거리 음원 위치, 음성 인식 및 음성 인터렉션에 능합니다.일반 마이크 모듈보다 더 많은 고급 기능을 제공합니다.
1) 사운드 소스 포지셔닝:
6 마이크 어레이를 통해 소음 감소 소스의 고정밀 위치를 구현하고 레이더 거리 인식과 함께 임의의 장소에서 Hiwonder를 소환 할 수 있습니다.
2) TTS 음성 방송
ROS가 게시한 문자 내용은 직접 음성 방송으로 변환할 수 있어 대화식 설계가 용이하다.
3) 음성 상호 작용
음성인식과 TTS 음성방송을 결합하여 음성상호작용을 실현하고 iFLYTEK 온라인 음성대화 기능 확장을 지원한다.
4) 음성 탐색
음성 명령을 사용하여 Hiwonder가 음식 배달 로봇의 음성 제어 장면과 유사한 지도에서 지정된 위치에 도달하도록 제어합니다.
7.상호 연결 형성
JetAuto는 멀티 컴퓨터 통신 및 네비게이션 기술을 통해 멀티 컴퓨터 편대 공연 및 인공지능 게임을 실현할 수 있다.
1) 다중 차량 탐색
JetAuto는 다중 컴퓨터 통신에 의존하여 다중 차량 탐색, 경로 계획 및 지능적인 장애물 회피를 구현할 수 있습니다.
2) 지능편대
JetAuto 로트는 수평선, 수직선 및 삼각형을 포함하여 이동 중에도 대형을 유지할 수 있습니다.
3) 그룹 제어
하나의 무선 손잡이로 일련의 JetAuto를 제어하여 작업을 통합하고 동시에 수행
8.ROS 로봇 운영 체제
ROS는 하드웨어 추상, 기본 장치 제어, 자주 사용하는 기능 구현, 프로세스 간 메시징, 패키지 관리 등 기초 서비스와 컴퓨터 간 코드 획득, 컴파일, 작성 및 실행에 필요한 도구와 라이브러리 함수를 제공하는 오픈 소스 로봇 메타 운영 체제로, 로봇 개발에 코드 재사용 지원을 제공하기 위한 것이다.
9.정자 시뮬레이션
JetAuto는 로봇 운영 체제(ROS)에 구축되었으며 Gazebo 시뮬레이션과 통합되었습니다.이를 통해 아날로그 환경에서 로봇을 쉽게 제어할 수 있어 알고리즘 사전 검증을 통해 잠재적 오류를 방지하는 데 도움이 된다.Gazebo는 각 끝점과 중심의 동작 궤적을 관찰할 수 있는 시각적 데이터를 제공합니다.이러한 시각적 피드백은 알고리즘 강화에 도움이 된다.
1) 차체 시뮬레이션 제어:
로봇 시뮬레이션 제어를 통해 건도 네비게이션의 알고리즘 검증을 진행할 수 있으며, 알고리즘의 반복 속도를 높이고 반복 실험의 비용을 줄일 수 있다.
2) Rviz 프리젠테이션 URDF 모델
정확한 URDF 모델을 제공하고 Rviz 시각화 도구를 통해 건도 탐색 효과를 관찰하여 알고리즘을 쉽게 디버깅하고 개선할 수 있습니다.
10.다양한 제어 방법
1)WonderAi APP
2) 지도 탐색 앱(Android에만 해당)
3) 무선 핸들
관련 상품