


베스트셀러 상품



- Lynxmotion (LSS) - mechDOG 4족보행 기본 키트
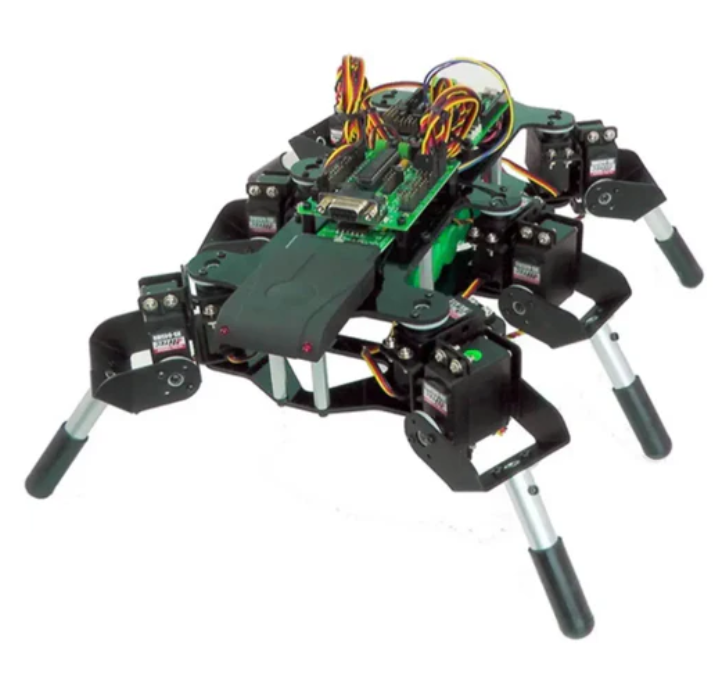
- 개발 및 실험을 위한 12DoF 4족 로봇
- 구성 가능하고 다재다능한 Lynxmotion 스마트 서버를 사용하세요
- 프레임 구성 요소는 내구성 있는 알루미늄과 G10 복합 소재로 만들어졌습니다.
- 센서, Raspberry Pi, Arduino 등을 추가하도록 설계되었습니다.
- 조립, 프로그래밍 및 추가 부품이 필요합니다.
- Lynxmotion (LSS) - mechDOG 4족 보행 로봇 기본 키트는 Lynxmotion과 Mech-Dickel Robotics가 협업하여 포유류와 유사한 자유도를 갖춘 4족 보행 로봇 "개"를 만든 제품입니다. 이 중간 크기의 플랫폼은 사용자에게 실내 개발 및 실험을 위한 지능형 서보 기반 플랫폼을 제공하도록 설계되었습니다.
- Lynxmotion ST1 모듈식 스마트 서보가 다양한 Lynxmotion Servo Erector Set (SES) V2 스탠드와 함께 전반적으로 사용되었습니다. 차체 패널은 복합 G10으로 만들어졌고, 차체 측면 패널은 양극산화 처리된 알루미늄으로 만들어졌습니다. LSS 어댑터는 배터리 전원을 각 다리에 분배하는 데 사용되며, Arduino 쉴드와 호환되는 마이크로컨트롤러, Raspberry Pi와 같은 단일 보드 컴퓨터(SBC) 또는 USB 케이블과 직접 연결할 수 있습니다.
- 상단과 하단에 있는 엄지나사를 사용하면 내부 수납 공간에 빠르게 접근할 수 있습니다. 상단에는 RPLidar-A1 360도 레이저 스캐너와 같은 액세서리를 장착할 수 있는 장착 포인트가 있습니다. 로봇의 크기와 스마트 서보의 내장 기능은 자율적 행동, 내비게이션 등을 위한 다양한 센서를 장착할 수 있는 이상적이고 저렴한 개발 플랫폼입니다.
- Lynxmotion의 스마트 서보 모터(일반적으로 소형 데스크톱 4족보행자나 대형 4족보행자용 BLDC 모터에 사용되는 9g RC 서보와 다름)와 결합하면 개발자는 서보 모터를 효과적으로 제어하고 피드백을 받을 수 있습니다. 각 서보 모터에 대해 가능한 구성으로는 각도 범위, 중심 위치, 방향, 속도, LED 색상, 작동 모드(직렬 대 RC) 등이 있습니다. 각 서보 모터에 대한 피드백(직렬 모드)에는 절대 각도 위치, 전압, 전류, 속도, 온도, 서보 모터 상태가 포함되지만 이에 국한되지는 않습니다. 서보 모터는 "사람이 읽을 수 있는" 통신 프로토콜을 사용하므로 사용 및 이해가 매우 쉽습니다. 서보 모터에는 Arduino, Python, ROS 라이브러리를 사용할 수 있습니다.
- mechDOG 기본 키트는 고객이 마이크로컨트롤러나 단일 보드 컴퓨터 등 자신의 전자장치를 추가할 수 있도록 설계되었습니다. Arduino 호환 예제 모션 코드는 RC 입력과 함께 제공되며, 고객은 자신의 필요에 맞게 수정할 수 있습니다. 하지만 4족 개발 플랫폼의 경우, 고객은 자신의 필요와 응용 프로그램에 맞게 로봇을 프로그래밍해야 합니다.
- 특징
- 각 다리에는 3개의 자유도(DoF)가 있습니다: 엉덩이; 어깨; 무릎
- 다중 피드백 매개변수를 갖춘 완전 구성 가능한 스마트 서보 모터
- 모듈식 알루미늄 브라켓 및 G10 바디 패널
- 장착 플레이트: Parallax Ping 초음파 센서 샤프 GP2D 적외선 센서 SES V2 브라켓; LSS 서보
- Lynxmotion BotBoarduino, Arduino UNO, Lynxmotion LSS-2IO 및 Raspberry Pi용 장착 구멍
관련 상품









© cnebaymall-2023